I’ve created a quick hardware sketch of the Geo Graph Bot:
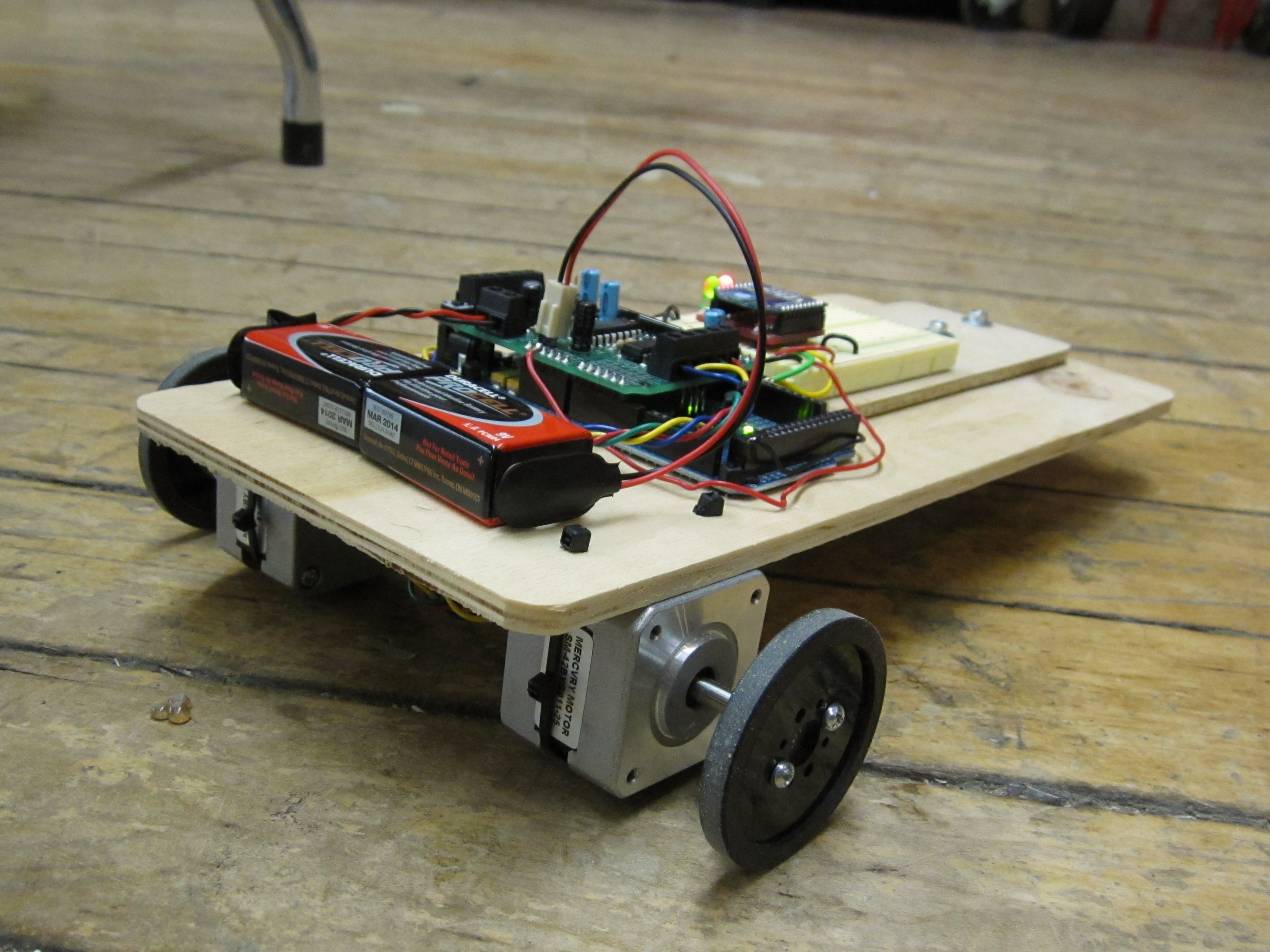
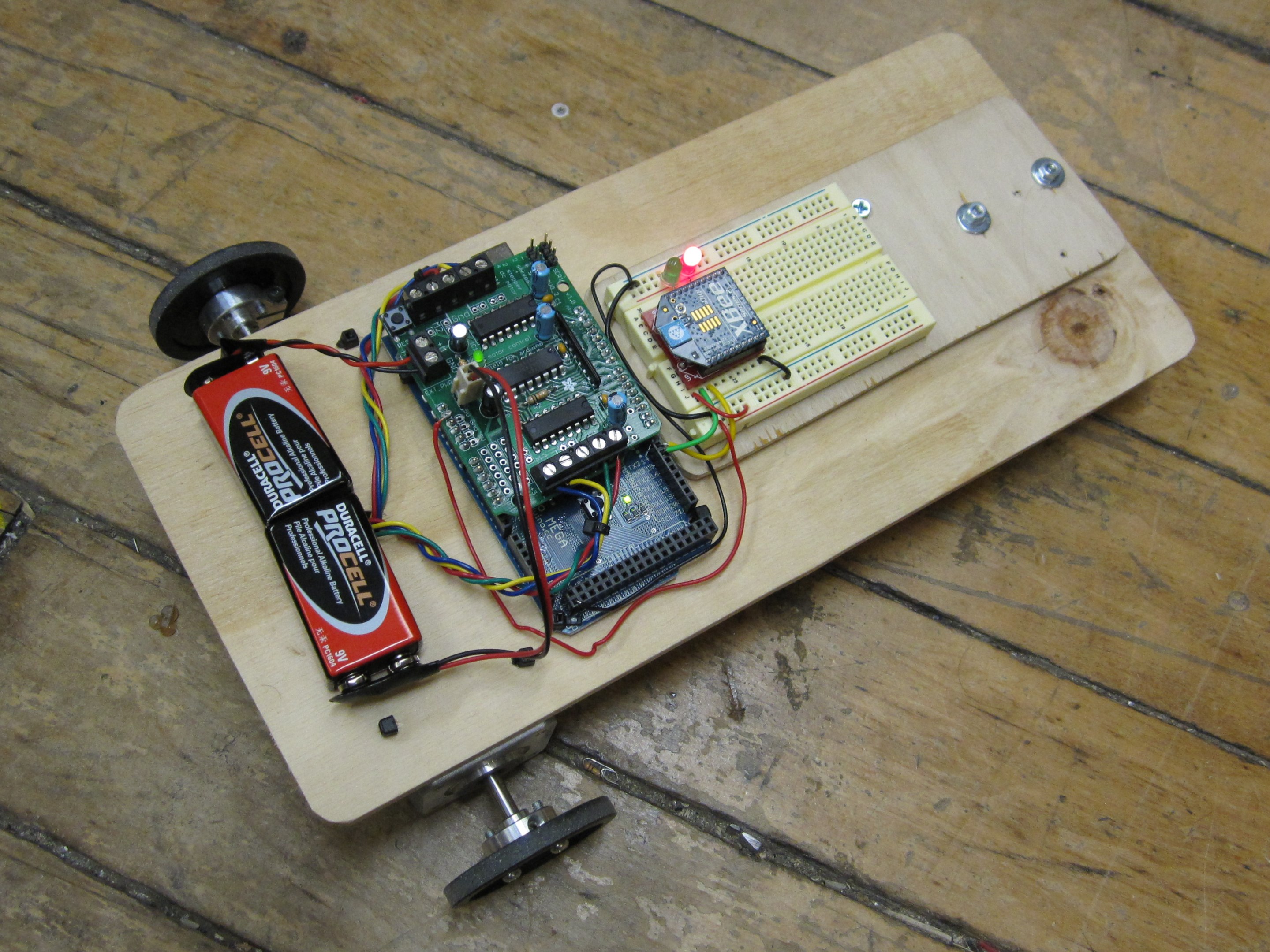
Current Revision
The bot receives commands over the air to steer, turn, etc. The wheels are too small, and the 9V battery is too weak for the steppers, so it’s not quite as fast / maneuverable as I expect the final version to be. Still, it works.
Here’s what it looks like in motion (it’s receiving commands wirelessly from a laptop):
Pending Modifications
Much of this version was limited by the supplies I had on hand. Several elements will change once the rest of the parts come in:
- It still needs the compass modules. (And accompanying auto-steering code.)
- Larger wheels (from 2" diameter to 4" or 5") should increase speed and improve traction.
- The whole thing will be powered by a 12v 2000mAh NiMH rechargeable battery. (Instead of a pair of 9Vs.)
- There will be a mechanism for the excretion of yarn to graph the bots path.
- Also planning on some kind of aesthetically satisfying enclosure once I have the final dimensions.
- I will use my own stepper drivers instead of the Adafruit motor shield.
I’m reducing the scope slightly from the originally planned three bots to just two. The parts turned out to be more expensive than I anticipated, so my initial goal is to prepare two bots, and then if time / finances allow, create a third. Part of the idea is to create a platform.
Steppers vs. DC Motors
I agonized a bit about whether to use stepper motors or DC motor to drive the bot’s wheels.
A plain DC motor seems to have some advantages in terms of control (you aren’t dealing with a digital signal), and since steering will be accomplished via a feedback loop from the compass data, their lack of precision probably would not be a big issue.
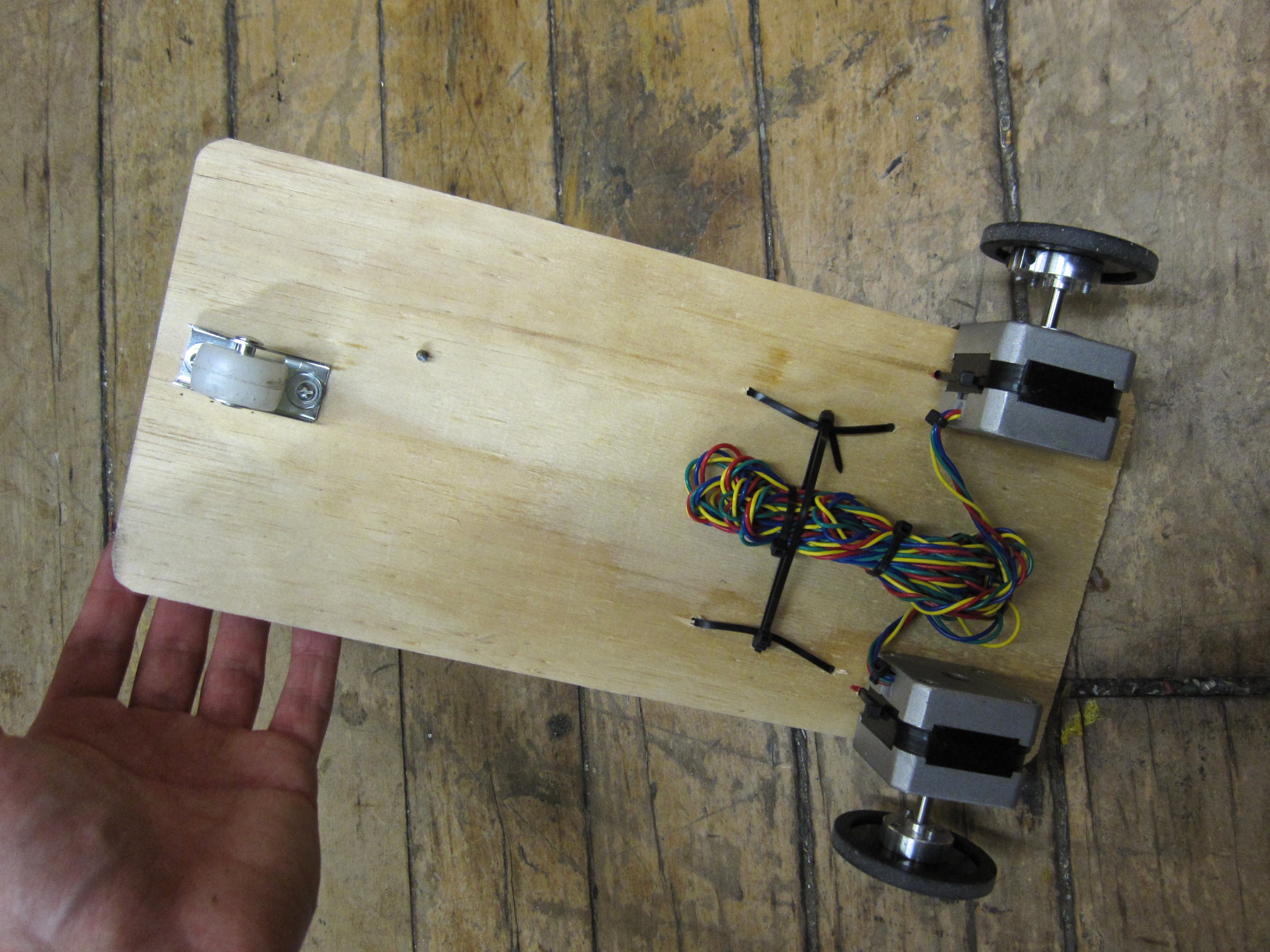
However, I already had steppers on hand, so I ended up using them instead. Steppers have a few advantages of their own. For one, there’s no need for gearing — in this case, the motor drives the wheels directly. Second, I have finer control over how far the bot travels and how it steers (assuming traction is good), so the platform itself will be more flexible for future (unknown) applications.
The big issue with steppers is that the Arduino code that drives them is all written in a blocking way… that is, you can’t run any other code while the motors are running. This was a problem, since I needed the bots to perform a number of steps in the background while it’s driving around: It needs to receive data from the control laptop, monitor the compass heading, reel out yarn, etc.
For now, I’m using some work-around code that uses a timer to call the stepping commands only when necessary, leaving time for other functions. This might not hold up once the main loop starts to get weighed down with other stuff, so I might end up writing an interrupt-driven version of the stepper library.